| Age | Commit message (Collapse) | Author | Lines |
|---|
|
This only updates the submodules the first time they're needed, instead
of unconditionally the first time you run x.py.
Ideally, this would move *all* submodules and not exclude some tools and
backtrace. Unfortunately, cargo requires all `Cargo.toml` files in the
whole workspace to be present to build any crate.
On my machine, this takes the time for an initial submodule clone (for
`x.py --help`) from 55.70 to 15.87 seconds.
This uses exactly the same logic as the LLVM update used, modulo some
minor cleanups:
- Use a local variable for `src.join(relative_path)`
- Remove unnecessary arrays for `book!` macro and make the macro simpler to use
- Add more comments
|
|
* Make html-checker run by default on rust compiler docs as well
* Ensure html-checker is run on CI
* Lazify tidy binary presence check
|
|
## User-facing changes
- Intra-doc links to primitives that currently go to rust-lang.org/nightly/std/primitive.x.html will start going to channel that rustdoc was built with. Nightly will continue going to /nightly; Beta will link to /beta; stable compilers will link to /1.52.1 (or whatever version they were built as).
- Cross-crate links from std to core currently go to /nightly unconditionally. They will start going to /1.52.0 on stable channels (but remain the same on nightly channels).
- Intra-crate links from std to std (or core to core) currently go to the same URL they are hosted at; they will continue to do so. Notably, this is different from everything else because it can preserve the distinction between /stable and /1.52.0 by using relative links.
Note that "links" includes both intra-doc links and rustdoc's own
automatically generated hyperlinks.
## Implementation changes
- Update the testsuite to allow linking to /beta and /1.52.1 in docs
- Use an html_root_url for the standard library that's dependent on the channel
This avoids linking to nightly docs on stable.
- Update rustdoc to use channel-dependent links for primitives from an
unknown crate
- Set DOC_RUST_LANG_ORG_CHANNEL from bootstrap to ensure it's in sync
- Include doc.rust-lang.org in the channel
|
|
|
|
bootstrap: ensure host std when cross-compiling tools, fixes #85320
|
|
bootstrap: build cargo only if requested in tools
In Debian we'd like to build rustfmt and clippy alongside rustc, but we're still excluding cargo from the rustc build and doing that separately. This patch makes that possible.
|
|
|
|
- Add rustfmt to `x.py check`
- Update Cargo.lock
- Remove rustfmt from the toolstate list
- Make rustfmt an in-tree tool
- Give an error on `x.py test rustfmt` if rustfmt fails to build or if tests fail
- Don't call `save_toolstate` when testing rustfmt
|
|
|
|
Previously, the LD_LIBRARY_PATH for the linkchecker looked like
`build/x86_64-unknown-linux-gnu/stage1/lib/rustlib/x86_64-unknown-linux-gnu/lib`, because the linkchecker depends on the master copy of the standard library. This is true, but doesn't include the library path for the compiler libraries:
```
/home/joshua/src/rust/rust/build/x86_64-unknown-linux-gnu/stage1-tools-bin/error_index_generator: error while loading shared libraries: libLLVM-12-rust-1.53.0-nightly.so: cannot open shared object file: No such file or directory
```
That file is in
`build/x86_64-unknown-linux-gnu/stage1/lib/libLLVM-12-rust-1.53.0-nightly.so`,
which wasn't included in the dynamic path. This adds `build/x86_64-unknown-linux-gnu/stage1/lib` to the dynamic path for the linkchecker.
|
|
Use tikv-jemallocator in rustc/rustdoc in addition to jemalloc-sys when enabled.
In https://github.com/rust-lang/rust/pull/81782 it was mentioned that one reason rustc may benefit from minimalloc is it doesn't use the `sdallocx` api from jemalloc.
Currently, on unix, rust uses jemalloc by importing its symbols to use them with the default, System (libc) global allocator.
This PR switches its global alloc to `tikv-jemallocator`, which correctly uses sized deallocation (https://docs.rs/tikv-jemallocator/0.4.1/src/tikv_jemallocator/lib.rs.html#121-126). `tikv-jemallocator`, as far as I can tell, is a more up-to-date set of bindings to jemalloc than `jemallocator`
The perf results of this pr are in large part due to the version upgrade of jemalloc, but sized deallocation has a non-trivial improvement, particularly to rustdoc.
This pr also includes changes to bootstrap to correctly pass the jemalloc feature through to the rustdoc build
|
|
Use the beta compiler for building bootstrap tools when `download-rustc` is set
## Motivation
This avoids having to rebuild bootstrap and tidy each time you rebase
over master. In particular, it makes rebasing and running `x.py fmt` on
each commit in a branch significantly faster. It also avoids having to
rebuild bootstrap after setting `download-rustc = true`.
## Implementation
Instead of extracting the CI artifacts directly to `stage0/`, extract
them to `ci-rustc/` instead. Continue to copy them to the proper
sysroots as necessary for all stages except stage 0.
This also requires `bootstrap.py` to download both stage0 and CI
artifacts and distinguish between the two when checking stamp files.
Note that since tools have to be built by the same compiler that built
`rustc-dev` and the standard library, the downloaded artifacts can't be
reused when building with the beta compiler. To make sure this is still
a good user experience, warn when building with the beta compiler, and
default to building with stage 2.
I tested this by rebasing this PR from edeee915b1c52f97411e57ef6b1a8bd46548a37a over 1c77a1fa3ca574f2a40056f64d498db8efe0d8a8 and confirming that only the bootstrap library itself had to be rebuilt, not any dependencies and not `tidy`. I also tested that a clean build with `x.py build` builds rustdoc exactly once and does no other work, and that `touch src/librustdoc/lib.rs && x.py build` works. `x.py check` still behaves as before (checks using the beta compiler, even if there are changes to `compiler/`).
Helps with https://github.com/rust-lang/rust/issues/81930.
r? `@Mark-Simulacrum`
|
|
|
|
## Motivation
This avoids having to rebuild bootstrap and tidy each time you rebase
over master. In particular, it makes rebasing and running `x.py fmt` on
each commit in a branch significantly faster. It also avoids having to
rebuild bootstrap after setting `download-rustc = true`.
## Implementation
Instead of extracting the CI artifacts directly to `stage0/`, extract
them to `ci-rustc/` instead. Continue to copy them to the proper
sysroots as necessary for all stages except stage 0.
This also requires `bootstrap.py` to download both stage0 and CI
artifacts and distinguish between the two when checking stamp files.
Note that since tools have to be built by the same compiler that built
`rustc-dev` and the standard library, the downloaded artifacts can't be
reused when building with the beta compiler. To make sure this is still
a good user experience, warn when building with the beta compiler, and
default to building with stage 2.
|
|
Adds bootstrap rules to support installing rust-demangler.
When compiling with `-Z instrument-coverage`, the coverage reports are
generated by `llvm-cov`. `llvm-cov` includes a built-in demangler for
C++, and an option to supply an alternate demangler. For Rust, we have
`rust-demangler`, currently used in `rustc` coverage tests.
Fuchsia's toolchain for Rust is built via `./x.py install`. Fuchsia is
adding support for Rust coverage, and we need to include the
`rust-demangler` in the installed `bin` directory.
Configured rust-demangler as an in-tree extended tool.
Added tests to support `./x.py test rust-demangler`.
Install with extended tools by default only if `profiler = true`.
|
|
Remove `ENABLE_DOWNLOAD_RUSTC` constant
`ENABLE_DOWNLOAD_RUSTC` was introduced as part of the MVP for `download-rustc` as a way not to rebuild artifacts that have already been downloaded. Unfortunately, it doesn't work very well:
- Steps are ignored by default, which makes it easy to leave out a step
that should be built. For example, the MVP forgot to enable any tests,
so it was only possible to *build* locally.
- It didn't work correctly even when it was enabled: calling
`builder.ensure()` would completely ignore the constant and rebuild the
step anyway. This has no obvious fix since `ensure()` has to return a
`Step::Output`.
Instead, this handles `download-rustc` in `impl Step for Rustc` and
`impl Step for Std`, which to my knowledge are the only build steps that
don't first go through `impl Step for Sysroot` (`Rustc` is used for
the `rustc-dev` component).
See https://github.com/rust-lang/rust/pull/79540#discussion_r563350075 and https://github.com/rust-lang/rust/issues/81930 for further context.
Here are some example runs with these changes and `download-rustc`
enabled:
```
$ x.py build src/tools/clippy
Building stage1 tool clippy-driver (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 1m 09s
Building stage1 tool cargo-clippy (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 0.11s
$ x.py test src/tools/clippy
Finished dev [unoptimized + debuginfo] target(s) in 0.09s
Building stage1 tool clippy-driver (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 0.09s
Building rustdoc for stage1 (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 0.28s
Finished release [optimized] target(s) in 15.26s
Running build/x86_64-unknown-linux-gnu/stage1-tools/x86_64-unknown-linux-gnu/release/deps/clippy_driver-8b407b140e0aa91c
test result: ok. 592 passed; 0 failed; 3 ignored; 0 measured; 0 filtered out
$ x.py build src/tools/rustdoc
Building rustdoc for stage1 (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 41.28s
Build completed successfully in 0:00:41
$ x.py test src/test/rustdoc-ui
Building stage0 tool compiletest (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 0.12s
Building rustdoc for stage1 (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 0.10s
test result: ok. 105 passed; 0 failed; 0 ignored; 0 measured; 0 filtered out; finished in 8.15s
$ x.py build compiler/rustc
Finished dev [unoptimized + debuginfo] target(s) in 0.09s
Build completed successfully in 0:00:00
```
Note a few things:
- Clippy depends on stage1 rustc-dev artifacts, but rustc didn't have to
be recompiled. Instead, the artifacts were copied automatically.
- All steps are always enabled. There is no danger of forgetting a step,
since only the entrypoints have to handle `download-rustc`.
- Building the compiler (`compiler/rustc`) automatically does no work.
Helps with https://github.com/rust-lang/rust/issues/81930.
r? `@Mark-Simulacrum`
|
|
This avoids naming collisions, particularly on Windows where the
dynamic library variable is PATH and setting it causes the in-tree
`tidy` to take precedence over the HTML tidy used by compiletest.
|
|
This was introduced as part of the MVP for `download-rustc`.
Unfortunately, it doesn't work very well:
- Steps are ignored by default, which makes it easy to leave out a step
that should be built. For example, the MVP forgot to enable any tests,
so it was *only* possible to build locally.
- It didn't work correctly even when it was enabled: calling
`builder.ensure()` would completely ignore the constant and rebuild the
step anyway. This has no obvious fix since `ensure()` has to return a
`Step::Output`.
Instead, this handles `download-rustc` in `impl Step for Rustc` and
`impl Step for Std`, which to my knowledge are the only build steps that
don't first go through `impl Step for Sysroot` (`Rustc` is used for
the `rustc-dev` component).
See https://github.com/rust-lang/rust/pull/79540#discussion_r563350075
and https://github.com/rust-lang/rust/issues/81930 for further context.
Here are some example runs with these changes and `download-rustc`
enabled:
```
$ x.py build src/tools/clippy
Building stage1 tool clippy-driver (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 1m 09s
Building stage1 tool cargo-clippy (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 0.11s
$ x.py test src/tools/clippy
Updating only changed submodules
Submodules updated in 0.01 seconds
Finished dev [unoptimized + debuginfo] target(s) in 0.09s
Building stage1 tool clippy-driver (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 0.09s
Building rustdoc for stage1 (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 0.28s
Finished release [optimized] target(s) in 15.26s
Running build/x86_64-unknown-linux-gnu/stage1-tools/x86_64-unknown-linux-gnu/release/deps/clippy_driver-8b407b140e0aa91c
test result: ok. 592 passed; 0 failed; 3 ignored; 0 measured; 0 filtered out
$ x.py build src/tools/rustdoc
Building rustdoc for stage1 (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 41.28s
Build completed successfully in 0:00:41
$ x.py test src/test/rustdoc-ui
Building stage0 tool compiletest (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 0.12s
Building rustdoc for stage1 (x86_64-unknown-linux-gnu)
Finished release [optimized] target(s) in 0.10s
test result: ok. 105 passed; 0 failed; 0 ignored; 0 measured; 0 filtered out; finished in 8.15s
$ x.py build compiler/rustc
Finished dev [unoptimized + debuginfo] target(s) in 0.09s
Build completed successfully in 0:00:00
```
Note a few things:
- Clippy depends on stage1 rustc-dev artifacts, but rustc didn't have to
be recompiled. Instead, the artifacts were copied automatically.
- All steps are always enabled. There is no danger of forgetting a step,
since only the entrypoints have to handle `download-rustc`.
- Building the compiler (`compiler/rustc`) automatically does no work.
|
|
- Use the same compiler for stage0 and stage1. This should be fixed at
some point (so bootstrap isn't constantly rebuilt).
- Make sure `x.py build` and `x.py check` work.
- Use `git merge-base` to determine the most recent commit to download.
- Copy stage0 to the various sysroots in `Sysroot`, and delegate to
Sysroot in Assemble. Leave all other code unchanged.
- Rename date -> key
This can also be a commit hash, so 'date' is no longer a good name.
- Add the commented-out option to config.toml.example
- Disable all steps by default when `download-rustc` is enabled
Most steps don't make sense when downloading a compiler, because they'll
be pre-built in the sysroot. Only enable the ones that might be useful,
in particular Rustdoc and all `check` steps.
At some point, this should probably enable other tools, but rustdoc is
enough to test out `download-rustc`.
- Don't print 'Skipping' twice in a row
Bootstrap forcibly enables a dry run if it isn't already set, so
previously it would print the message twice:
```
Skipping bootstrap::compile::Std because it is not enabled for `download-rustc`
Skipping bootstrap::compile::Std because it is not enabled for `download-rustc`
```
Now it correctly only prints once.
## Future work
- Add FIXME about supporting beta commits
- Debug logging will never work. This should be fixed.
|
|
|
|
|
|
|
|
|
|
Fix cross compiling dist/build invocations
I am uncertain why the first commit is not affecting CI. I suspect it's because we pass --disable-docs on most of our cross-compilation builders. The second commit doesn't affect CI because CI runs x.py dist, not x.py build.
Both commits are standalone; together they should resolve #76733. The first commit doesn't really fix that issue but rather just fixes cross-compiled x.py dist, resolving a bug introduced in #76549.
|
|
|
|
The Rust version number is currently embedded in bootstrap's source
code, which makes it hard to update it automatically or access it
outside of ./x.py (as you'd have to parse the source code).
This commit moves the version number to a standalone plaintext file,
which makes accessing or updating it trivial.
|
|
This isn't an issue for most folks who use x.py dist, which will directly depend
on this. But for x.py build, if we don't properly set target here rustdoc will
not be built.
Currently, there is not a default-on step for generating a rustc for a given
target either, so we will fail to build a rustc as well.
|
|
|
|
rustc is a natively cross-compiling compiler, and generally none of our steps
should care whether they are using a compiler built of triple A or B, just the
--target directive being passed to the running compiler. e.g., when building for
some target C, you don't generally want to build two stds: one with a host A
compiler and the other with a host B compiler. Just one std is sufficient.
|
|
This is generally a good idea, and will help with being able to build bootstrap
without Python over time as it means we can "just" build with cargo +beta build
rather than needing the user to set environment variables. This is a minor step,
but a necessary one on that road.
|
|
Generating the coverage map
@tmandry @wesleywiser
rustc now generates the coverage map and can support (limited)
coverage report generation, at the function level.
Example commands to generate a coverage report:
```shell
$ BUILD=$HOME/rust/build/x86_64-unknown-linux-gnu
$ $BUILD/stage1/bin/rustc -Zinstrument-coverage \
$HOME/rust/src/test/run-make-fulldeps/instrument-coverage/main.rs
$ LLVM_PROFILE_FILE="main.profraw" ./main
called
$ $BUILD/llvm/bin/llvm-profdata merge -sparse main.profraw -o main.profdata
$ $BUILD/llvm/bin/llvm-cov show --instr-profile=main.profdata main
```
r? @wesleywiser
Rust compiler MCP rust-lang/compiler-team#278
Relevant issue: #34701 - Implement support for LLVMs code coverage instrumentation
|
|
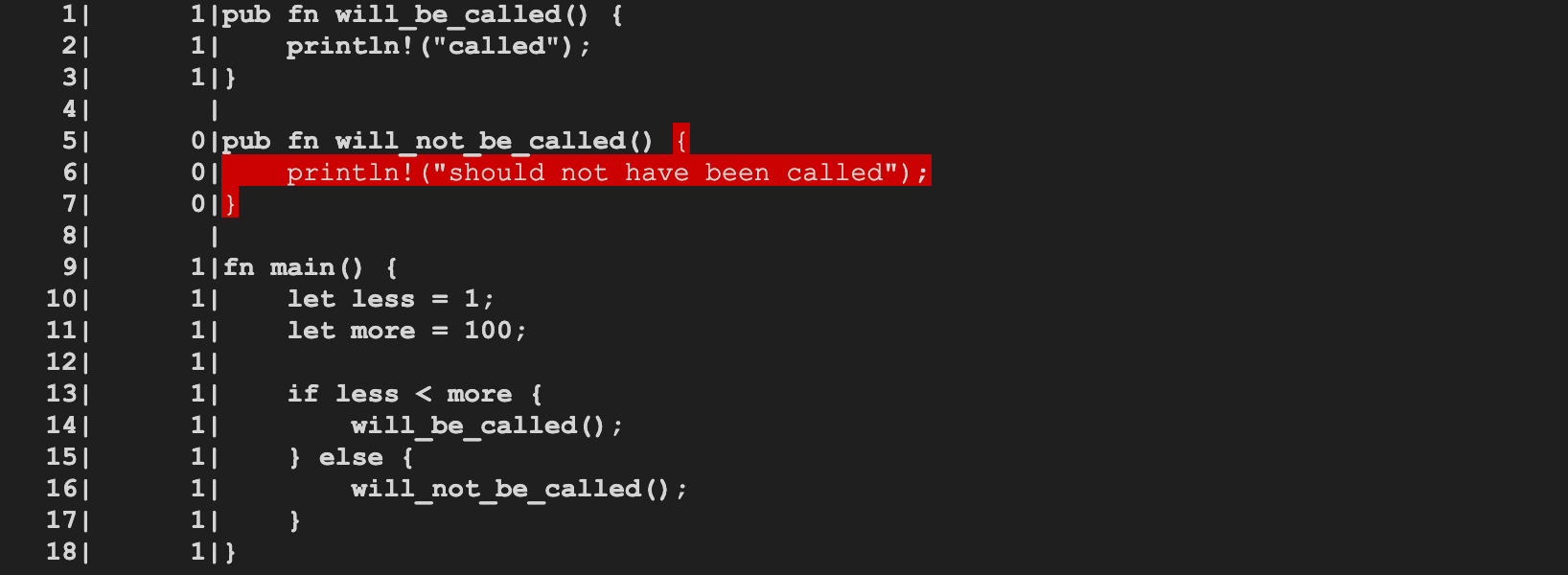
rustc now generates the coverage map and can support (limited)
coverage report generation, at the function level.
Example:
$ BUILD=$HOME/rust/build/x86_64-unknown-linux-gnu
$ $BUILD/stage1/bin/rustc -Zinstrument-coverage \
$HOME/rust/src/test/run-make-fulldeps/instrument-coverage/main.rs
$ LLVM_PROFILE_FILE="main.profraw" ./main
called
$ $BUILD/llvm/bin/llvm-profdata merge -sparse main.profraw -o main.profdata
$ $BUILD/llvm/bin/llvm-cov show --instr-profile=main.profdata main
1| 1|pub fn will_be_called() {
2| 1| println!("called");
3| 1|}
4| |
5| 0|pub fn will_not_be_called() {
6| 0| println!("should not have been called");
7| 0|}
8| |
9| 1|fn main() {
10| 1| let less = 1;
11| 1| let more = 100;
12| 1|
13| 1| if less < more {
14| 1| will_be_called();
15| 1| } else {
16| 1| will_not_be_called();
17| 1| }
18| 1|}
|
|
`rustc` allows passing in predefined target triples as well as JSON
target specification files. This change allows bootstrap to have the
first inkling about those differences. This allows building a
cross-compiler for an out-of-tree architecture (even though that
compiler won't work for other reasons).
Even if no one ever uses this functionality, I think the newtype
around the `Interned<String>` improves the readability of the code.
|
|
The current plan is that submodule tracks the `release` branch of
rust-analyzer, which is updated once a week.
rust-analyzer is a workspace (with a virtual manifest), the actual
binary is provide by `crates/rust-analyzer` package.
Note that we intentionally don't add rust-analyzer to `Kind::Test`,
for two reasons.
*First*, at the moment rust-analyzer's test suite does a couple of
things which might not work in the context of rust repository. For
example, it shells out directly to `rustup` and `rustfmt`. So, making
this work requires non-trivial efforts.
*Second*, it seems unlikely that running tests in rust-lang/rust repo
would provide any additional guarantees. rust-analyzer builds with
stable and does not depend on the specifics of the compiler, so
changes to compiler can't break ra, unless they break stability
guarantee. Additionally, rust-analyzer itself is gated on bors, so we
are pretty confident that test suite passes.
|
|
|
|
|
|
|
|
|
|
No one actually works with src/tools/librustdoc, it's almost empty.
|
|
|
|
|
|
Since rustc-ap-* v659 we now need to set CFG_RELEASE for
rustc-ap-rustc_attr for `#[cfg(version(...))]` to work.
Co-authored-by: Eric Huss <ehuss@users.noreply.github.com>
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
